









Das linhas de montagem às praças públicas: a crescente presença de robôs humanoides e autônomos na automação moderna
- 〡
- 〡 por WUPAMBO
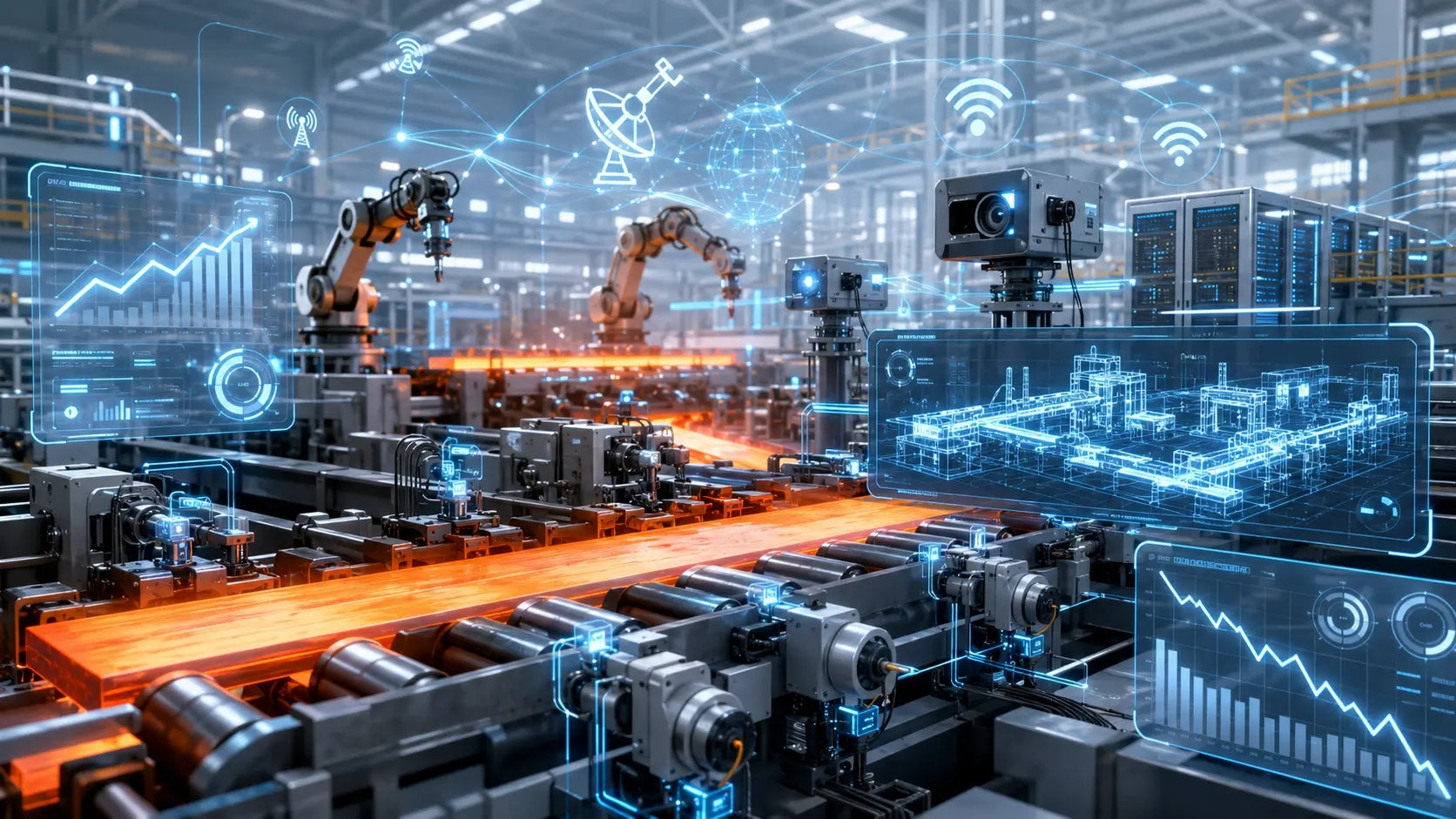
O cenário da automação industrial está passando por uma grande mudança de paradigma. Sistemas autônomos estão avançando rapidamente além das tarefas tradicionais com braços fixos. Hoje, robótica móvel avançada e sistemas humanoides estão fazendo a transição com sucesso de ambientes industriais altamente controlados para espaços públicos dinâmicos e do mundo real. Essa evolução destaca um grande avanço na adaptabilidade dos sistemas de controle, integração de sensores e poder de processamento em tempo real.
A Evolução da Mobilidade: Atualizando Além da Robótica Industrial Fixa
Os projetos tradicionais de plantas industriais há muito dependem de células robóticas estacionárias, geralmente gerenciadas por Controladores Lógicos Programáveis (CLPs) ou Sistemas de Controle Distribuído (DCS). No entanto, as operações modernas em campo exigem alta mobilidade e consciência espacial. Demonstrações públicas recentes em Seul, Coreia do Sul, destacaram perfeitamente essa mudança tecnológica. Robôs humanoides navegaram com sucesso por multidões densas durante procissões culturais, mantendo um passo estável e equilibrado ao longo de um percurso contínuo de dois quilômetros.
Para engenheiros de automação, isso representa um grande avanço em visão computacional e algoritmos de locomoção bípede. Os sistemas de controle embutidos nessas plataformas móveis devem processar continuamente variáveis como atrito da superfície, inclinações e obstáculos inesperados. Essas unidades avançadas realizam cálculos complexos de feedback ambiental instantaneamente. Como resultado, oferecem um nível de adaptabilidade dinâmica que a automação industrial pré-programada tradicional simplesmente não consegue igualar.
Sinergia Global de Hardware: Impulsionando a Integração Aberta na Automação Industrial
A crescente demanda por hardware ágil gerou uma colaboração profunda em toda a cadeia internacional de suprimentos. Em exposições recentes do setor, parcerias de automação industrial de alta tecnologia roubaram a cena. A integração do robô humanoide G1 da Unitree e do IL Bot da AgiBot com frameworks locais de automação mostra que o setor está avançando ativamente rumo à compatibilidade universal.
Do ponto de vista da engenharia de sistemas, o verdadeiro desafio está nos protocolos de comunicação. Unidades humanoides modernas requerem conexões fieldbus de alta velocidade e baixa latência, como EtherCAT ou TSN (Time-Sensitive Networking), para conectar com segurança seus controladores internos proprietários às redes DCS padrão da planta. Essa integração perfeita permite que diagnósticos em tempo real, monitoramento de torque e dados de intertravamento de segurança fluam suavemente entre os robôs móveis e a sala de controle principal.
Aplicações Pesadas: Levando Logística de Alta Carga para o Piso de Produção
A tecnologia humanoide está avançando rapidamente além da fase piloto e entrando diretamente no manuseio pesado de materiais. Um exemplo principal é a demonstração recente do robô totalmente elétrico Atlas, da Boston Dynamics, que levantou e transportou facilmente um refrigerador compacto de 23 quilos. Com capacidade total de carga útil de 45 quilos, o Atlas depende de sistemas avançados de atuadores hidráulicos e elétricos, além de algoritmos sofisticados de equilíbrio para gerenciar cargas fora do centro.
Essa capacidade específica está atraindo grandes investimentos das indústrias pesadas. Gigantes automotivos como Hyundai Motor Company e Kia planejam implantar mais de 25.000 unidades do Atlas em suas instalações de fabricação, estabelecendo uma meta de produção de 30.000 unidades por ano até 2028. Para gerentes de planta, implantar esses robôs ágeis em espaços apertados ajuda a preencher a lacuna entre sistemas tradicionais de esteiras fixas e plataformas móveis autônomas. Em última análise, essa integração maximiza a eficiência operacional geral ao longo da linha de montagem.
Implantação Crítica: Reforçando Robôs Quadrúpedes para Ambientes Extremos
Além do manuseio pesado na fábrica, máquinas autônomas estão fazendo contribuições que salvam vidas em ambientes críticos. A sede de Bombeiros e Desastres de Seul recentemente comprovou isso ao testar "cães robôs" quadrúpedes — como o Spot da Boston Dynamics e o Lynx da Deep Robotics — em zonas simuladas de metrô cheias de fumaça e perigosas.
Essas plataformas quadrúpedes ágeis localizaram com sucesso sobreviventes em condições de visibilidade zero, trabalhando ao lado de caminhões de bombeiros especializados de piso baixo. Para especialistas em sistemas de controle, isso é uma aula magistral em construção de equipamentos robustos. Essas unidades de campo usam invólucros selados e à prova de explosão e conjuntos especializados de sensores que atendem aos altos padrões da Instrumentação Supervisória de Turbinas (TSI). São projetadas para suportar calor extremo, poeira pesada e vibração severa, garantindo transmissão confiável de dados para os centros de comando durante operações de resgate de alta complexidade.
Crescimento de Mercado a Longo Prazo: Preparando-se para um Futuro Automatizado de Trilhões de Dólares
O rápido desenvolvimento da robótica industrial é respaldado por previsões financeiras massivas. Instituições financeiras globais líderes, incluindo Goldman Sachs, preveem que o mercado mundial de robôs humanoides atingirá aproximadamente 38 bilhões de dólares até 2035. Olhando mais adiante, Morgan Stanley projeta que esse setor em expansão pode alcançar um mercado de 5 trilhões de dólares até 2050.
Projeções financeiras indicam que a adoção precoce da tecnologia humanoide trará retornos exponenciais em otimização de plantas e segurança da força de trabalho nas próximas duas décadas.
Para líderes corporativos de automação, esses números transmitem uma mensagem clara: investir no desenvolvimento de humanoides não é mais opcional. Abraçar esses sistemas avançados é um passo vital para a competitividade a longo prazo. À medida que os custos de hardware caem e os modelos de aprendizado de máquina melhoram, robôs humanoides em breve se tornarão componentes padrão em estratégias abrangentes de automação industrial em todo o mundo.
Cenário Prático de Implantação: Integração de Logística Automatizada
Este plano prático ilustra como uma planta industrial pode integrar plataformas humanoides móveis em um ecossistema de armazém de alta capacidade.
Infraestrutura Pré-requisito
-
Infraestrutura de Rede: Rede industrial Wi-Fi 6 ou 5G privada em toda a planta com latência inferior a 10 ms.
-
Arquitetura de Controle: DCS principal da planta utilizando um servidor OPC UA (Open Platform Communications Unified Architecture) para compartilhamento de dados neutro em relação a fornecedores.
-
Protocolos de Segurança: Zonas de segurança funcional definidas via scanners a laser e monitoradas por um CLP de Segurança (classificação SIL 3).
Sequência do Fluxo Operacional
O DCS central da planta identifica um déficit de peças na Linha de Montagem 4 e emite um comando seguro de retirada de material para a frota de robôs do armazém via protocolo OPC UA.
Uma unidade humanoide autônoma navega pelos corredores do armazém usando LiDAR e visão 3D, evita com segurança obstáculos estáticos e dinâmicos, e retira uma caixa de componentes de 30 quilos de uma prateleira alta.
Sensores internos do robô humanoide transmitem continuamente dados de vibração, torque das juntas e temperatura para a estação principal de monitoramento, usando métodos de telemetria semelhantes aos setups TSI para detectar precocemente quaisquer anomalias de hardware.
O robô entrega a caixa diretamente à estação de trabalho da célula de montagem, realiza um handshake de hardware com o CLP local da célula via EtherCAT e confirma a entrega bem-sucedida no banco de dados principal do DCS.
Sobre o Autor: Lin Xiaofeng
Lin Xiaofeng é um Engenheiro Sênior de Automação Industrial e Colaborador Tecnológico com mais de 15 anos de experiência prática em design, programação e comissionamento de sistemas de controle complexos. Sua expertise principal abrange arquiteturas de CLPs de alta confiabilidade, Sistemas de Controle Distribuído (DCS) em larga escala e Instrumentação Supervisória de Turbinas (TSI) para indústrias pesadas e usinas de geração de energia. Lin é especialista em conectar redes industriais legadas a robótica autônoma de próxima geração, ajudando instalações industriais modernas a alcançar com segurança a máxima eficiência operacional.
Tags SEO: automação industrial, automação de fábricas, sistemas de controle CLP, integração de rede DCS, robótica humanoide móvel, Boston Dynamics Atlas, logística no chão de fábrica, soluções de engenharia para plantas
- Publicado em:
- Boston Dynamics Atlas
- DCS network integration
- factory automation
- factory floor logistics
- PLC control systems








{kind=link}