














Détails du produit
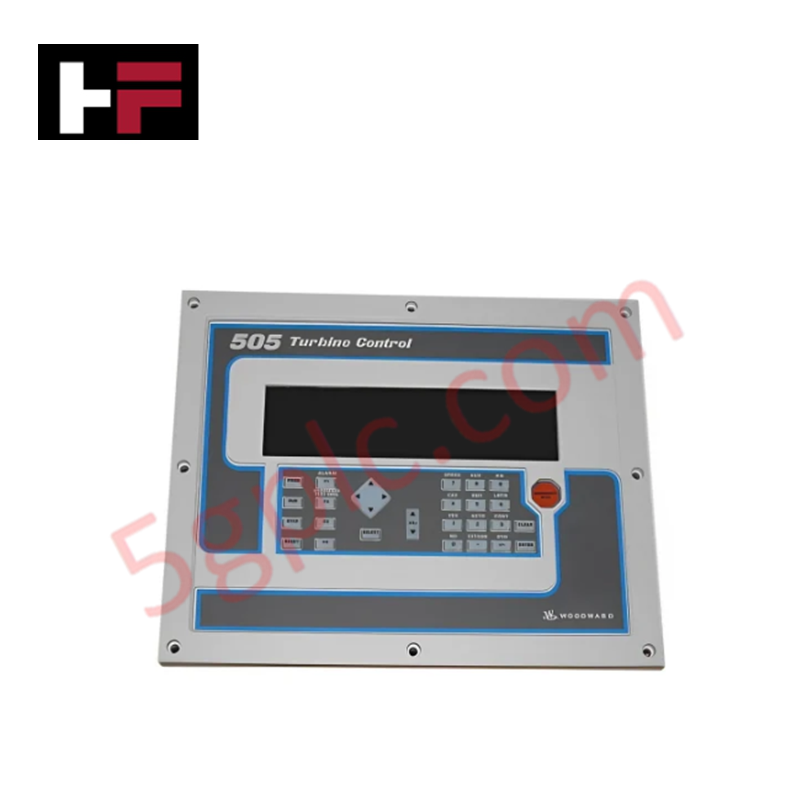
Le Woodward 9907-162, également référencé comme le 9907-162 Régulateur Numérique, fonctionne comme un composant matériel dédié à la gestion des turbines à vapeur au sein des plateformes de contrôle MicroNet et 505.
Spécifications Matérielles
| Paramètre | Spécification |
|---|---|
| Modèle | 9907-162 |
| Marque | Woodward |
| Origine | Non spécifiée |
| Poids | 9,11 lbs |
| Dimensions | 11 x 14 x 4 pouces |
| Température de fonctionnement | -20 à 60 °C |
| Consommation électrique | +24 VCC à 1 A |
| Indice de protection | NEMA 4X / IP 56 |
| Interface processeur | Clavier multifonction à 30 touches |
| Communication | RS-232, RS-422, RS-485 |
Réponse de la Boucle de Rétroaction de l’Actionneur
Le 9907-162 utilise une architecture basée sur microprocesseur pour traiter la vitesse de la turbine et les variables de procédé en commandes de contrôle précises. L’unité dispose de 2 sorties actionneurs dédiées, modulées pour maintenir une performance stable du régulateur sous des conditions variables de charge vapeur. Pour assurer une réponse constante de la boucle de rétroaction de l’actionneur, le contrôleur prend en charge l’acquisition rapide de données provenant des capteurs de vitesse et des transmetteurs de procédé. Les sorties de courant programmables (6 au total) permettent un contrôle fin des actionneurs hydrauliques ou électriques auxiliaires. Le système est conçu pour fournir une réponse transitoire rapide lors des rejets de charge ou des événements de synchronisation, avec un support logiciel intégré pour les applications OpView et 505View afin de surveiller la stabilité de la boucle et le courant d’entraînement des actionneurs.
Questions Fréquemment Posées
Q : L’unité supporte-t-elle plusieurs protocoles de communication série simultanément ?
R : Le matériel supporte les interfaces RS-232, RS-422 et RS-485. Les utilisateurs doivent vérifier que la configuration du câblage et les paramètres des ports logiciels correspondent au protocole requis pour le contrôleur hôte ou la connexion HMI externe prévue.
Q : Quelle est la fonction des boutons intégrés d’arrêt d’urgence et de test de survitesse ?
R : Ces entrées physiques sont câblées directement dans la logique de sécurité du contrôleur pour déclencher une coupure immédiate de l’alimentation des sorties actionneurs. Le bouton de test de survitesse permet de vérifier fonctionnellement le circuit de détection de vitesse et la logique de déclenchement de survitesse sans nécessiter de conditions réelles de survitesse sur le rotor de la turbine.
Directives d’Installation sur Site
- Montage : Installez l’unité dans un boîtier conforme aux normes NEMA 4X ou IP 56 pour protéger le châssis de 11 x 14 x 4 pouces contre l’humidité et l’infiltration de particules.
- Câblage : Utilisez un câblage blindé pour toutes les entrées analogiques et sorties actionneurs. Reliez les blindages aux bornes de terre désignées sur le châssis de l’unité afin de maintenir l’intégrité du signal et de satisfaire aux exigences de compatibilité électromagnétique.
- Alimentation : Connectez à une source d’alimentation régulée +24 VCC capable de fournir au moins 1 A. Assurez-vous que le câblage d’alimentation est en paire torsadée pour minimiser les interférences dans les boucles de signaux analogiques sensibles.
- Validation : Au démarrage, effectuez un test de boucle des 6 sorties de courant programmables et des 8 sorties relais pour confirmer leur correspondance correcte avec les dispositifs de terrain. Vérifiez la communication sur les ports série avant d’activer le mode de contrôle automatique complet.
Informations supplémentaires
- Pièces 100 % d'origine : Tous les produits sont originaux et authentiques, garantissant des performances industrielles fiables.
- Garantie de remboursement de 30 jours : Retournez tout article en stock dans les 30 jours dans son emballage d'origine non ouvert pour un remboursement complet (hors frais de port et frais).
- Garantie de 12 mois : Couvre les défauts de matériaux ou de fabrication ; exclut les mauvais usages, l'usure normale ou les modifications non autorisées.
- Expédition mondiale : Nous expédions via USPS, UPS, FedEx et DHL. Les délais de livraison varient selon le pays et peuvent être soumis à des frais de douane ou d'importation.
- Assistance & Contact : Une assistance technique et garantie est disponible à tout moment. Contactez-nous ici : Contact.
- Conseils d'achat : Vérifiez attentivement les spécifications et la compatibilité du produit avant de commander pour assurer une application correcte.





Guide technique et d'achat

Maîtriser la terminologie de la sécurité fonctionnelle dans l’automatisation industrielle
Dans le domaine moderne du contrôle des procédés et de l’automatisation industrielle, la gestion des risques opérationnels constitue une priorité absolue pour les ingénieurs. Les machines à grande vitesse, les appareils sous haute pression et les procédés continus présentent des dangers permanents pour le personnel et les équipements. Les installations modernes s’appuient largement sur des stratégies de sécurité fonctionnelle pour atténuer ces risques. Ce guide présente les principaux termes de la sécurité fonctionnelle que tout ingénieur en systèmes de contrôle devrait maîtriser.

Comprendre les contacts secs dans le câblage PLC : un guide d'automatisation industrielle
Maîtriser les principes de commutation des contacts est essentiel pour des panneaux de contrôle fiables. Les dispositifs de terrain et les automates programmables (PLC) communiquent via des contacts secs ou humides. Ce guide technique examine le fonctionnement des contacts secs, explore leurs architectures de câblage et évalue leurs principaux avantages dans l'automatisation industrielle.

Liste de contrôle ultime pour la mise en service des systèmes d'automatisation industrielle : un guide d'ingénierie
La mise en service est la phase la plus décisive d’un projet d’automatisation industrielle, transformant le matériel et le logiciel de contrôle en une installation opérationnelle. Des tests rigoureux évitent des retards coûteux au démarrage et renforcent la confiance du client. Ce guide couvre les listes de contrôle essentielles, les normes électriques et les meilleures pratiques.